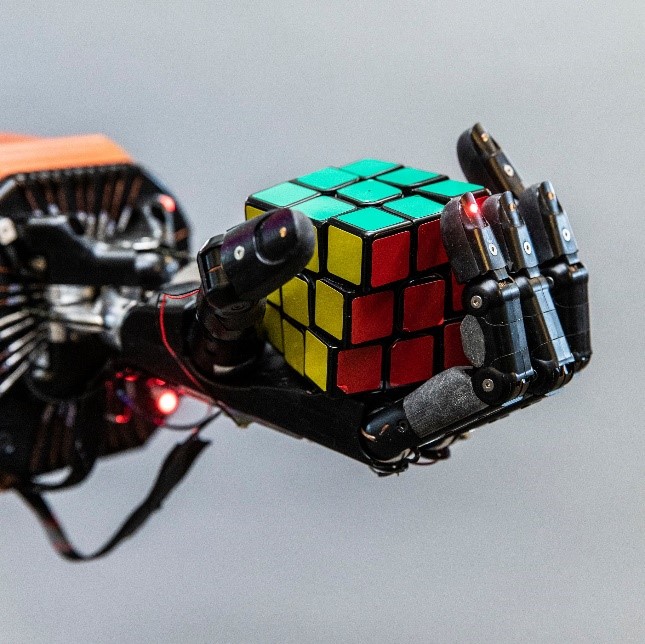
Rubik Kübü Çözen Robot El
Genel amaçlı robotların üretilebilmesi için değişen şartlara adaptasyon yeteneklerinin olmazsa olmaz olduğunu tespit eden OpenAI Robotik Ekibi bu amaçla 2017 yılında tek elle rubik kübü çözebilen bir robotik kol tasarlamaya girişiyorlar.
Robotun donanım kısmında bir yeniliğe ihtiyaç duymayan araştırmacılar (15 yıllık donanım kullanılıyor) yazılım kısmında farklı bir yaklaşım getiriyorlar. Nöral ağların eğitilmesi için ADR (Automatic Domain Randomization) isimli teknik kullanılıyor. Önce standart bir simülasyonda nöral ağların rubik kübün nasıl çözüldüğünü öğrenmesi ve belli bir performans seviyesine ulaştıkça ortamın daha da zorlaştırılmasıyla ilerleyen bu eğitim süreci robotun daha önce karşılaşmadığı durumlarla baş edebilme yeteneği geliştirmesini sağlıyor. Yapılan testler sonucunda robot kolun ilk birkaç döndürme hareketinde hatalar yaptığı ancak gitgide daha doğru hamleler yaptığı görülüyor, bunun da daha önce eğitildiği simülasyonlar ile fiziki dünyanın şartları arasında denge kurma sürecinden kaynaklandığı anlaşılıyor.
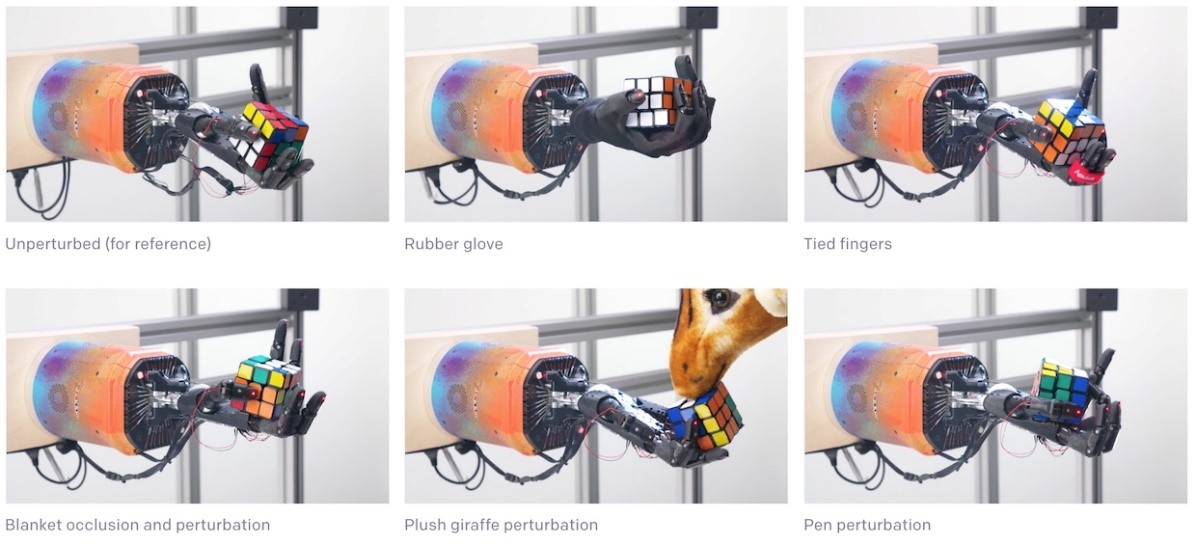
Yine bu testlerde robota bazen hareket kabiliyetini kısıtlayacak bazen de sensörlerinin performansını düşürmeyi amaçlayan engeller de çıkarılıyor ki ideal olmayan şartlarda dahi iş görebilen bir araç geliştirilebilsin.
Ekim 2019’da, projenin sonuçlarının duyurulmasını takip eden süreçte, OpenAI’nın kurucu ortağı ve Robotik ekibinin lideri olan Wojciech Zaremba Twitter üzerinden robot kol ile ilgili iki ilgi çekici anekdot paylaşıyor.
“Proje üyelerinden biri robotta sürekli daha iyi sonuçlar alıyordu. Bir süreliğine nedenini kavrayamadık. Sonradan anlaşıldı ki laptopu daha hızlıydı ve robotta daha az gecikmeye neden olup daha iyi sonuçlar ortaya çıkmasını sağlıyordu.”
“Bazen robotumuzun kısmi hasarlı olduğunun farkına varamıyorduk çünkü nöral ağlar bu eksiklikleri kapatıyordu. Robot, kırık parmaklar veya bozuk sensörlerle de gayet iyi çalışıyordu.”
OpenAI ekibi robotun mükemmel bir tekniğe sahip olmadığı ve serbest bırakıldığında %60 oranında (başarısız denemelerde genellike ilk hamlelerde dengeyi sağlayamamaktan dolayı kübü düşürüyor), engellere maruz kaldığında ise ancak %20 oranında başarıya ulaşabildiğini de söylemekten çekinmiyor.
Bu sürecin bir bebeğin deneme yanılma ile öğrenmesine çok benzetildiği ve genel amaçlı robotların üretilmesi konusunda önemli bir aşama olarak görülen bu çalışma ile ilgili detaylı bilgi için: https://openai.com/blog/solving-rubiks-cube/

Yanıt yok